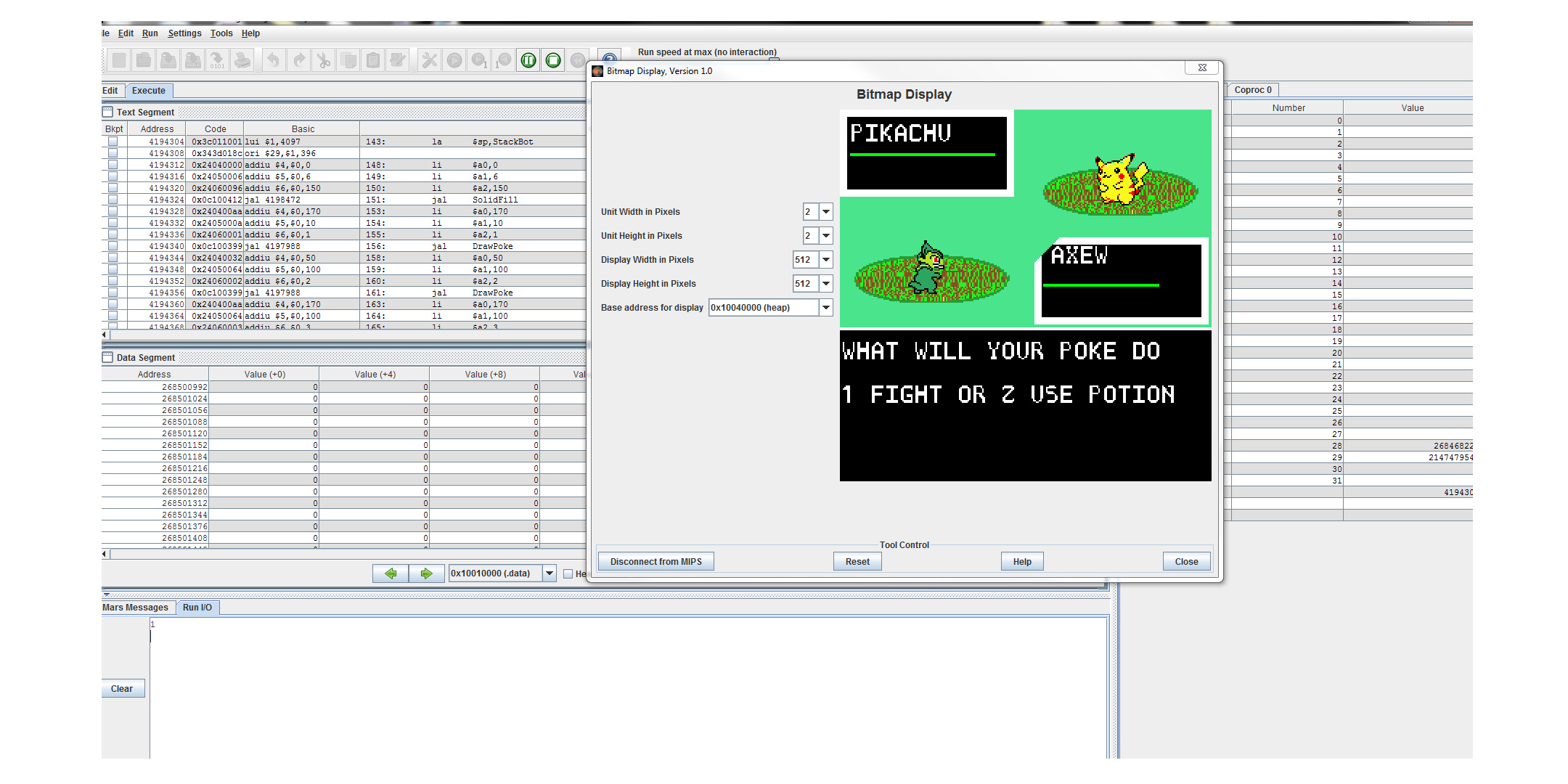
This picture is a screen shot from a game created using MIPS assembly language using the MARS MIPS assembler and runtime simulator. This was a final project for Computer engineering 351 Microprocessors. The overall goal was to be able to recreate a Pokémon battle from Nintendo’s famous franchise. The .asm file can be found on my github repo.
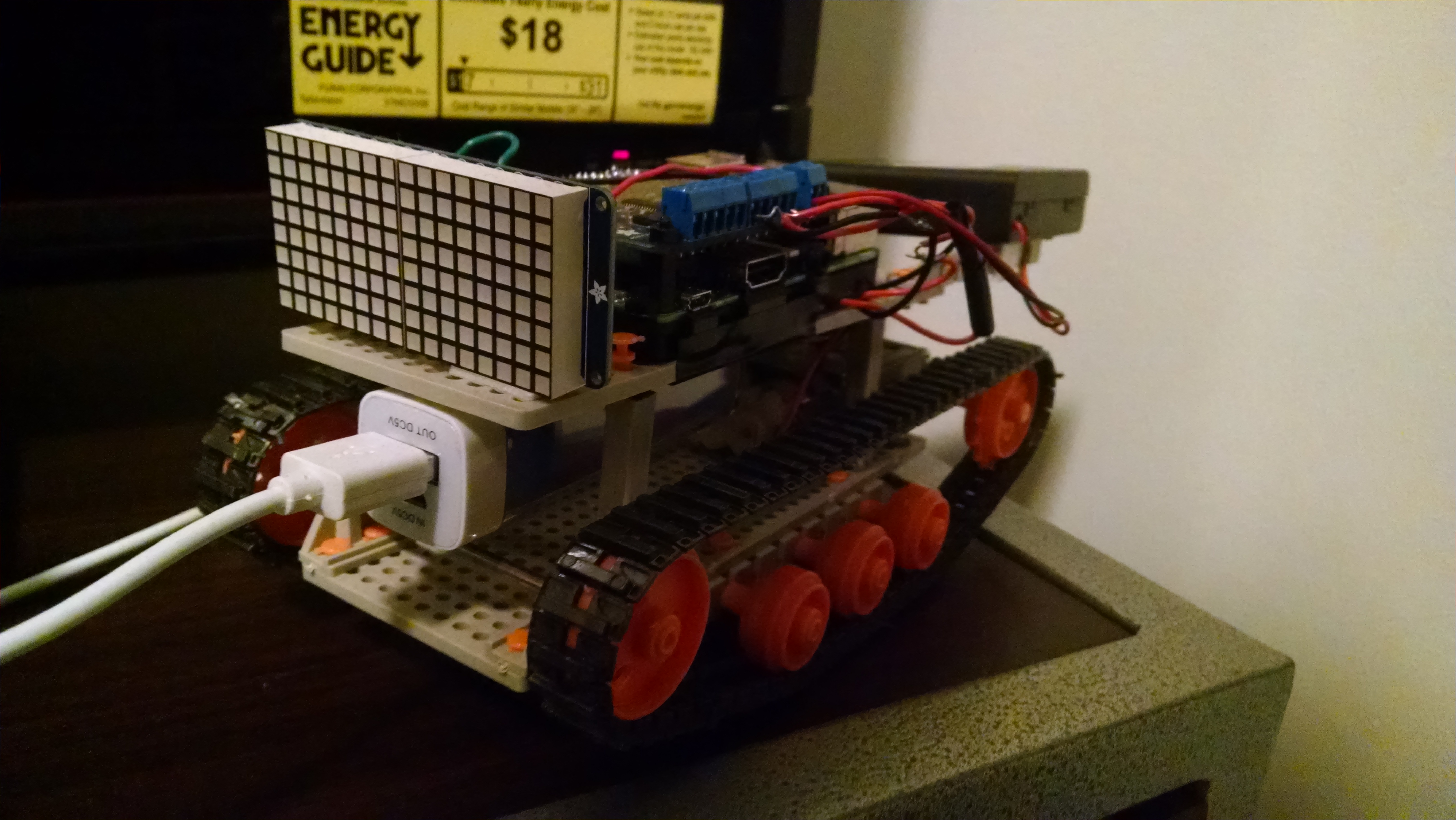
This project was inspired by the movie Wall-e I wanted to try and recreated the actual robot in the movie. Although it looks nothing like the robot from the movie this was my first prototype and first robot build. For this project I employed the use of a raspberry pi along with one of adafruits pi motor shields and led display backpack. The pi runs a python Bluetooth server that takes commands from an Android Bluetooth client app that I had created. The pi then sent different signals to either the motor shield or 16x8 led matrix display. Once I have the means I will hopefully improve upon this design to create a robot like Wall-e.
This is my second robot build. For this build I decided to use a pre made hexapod robot body along with an FPGA board to control the servos. This project was a final for Computer Engineering 371 Advanced Digital Design. The overall aim of the project was to create an autonomous hexapod robot that uses ultra-sonic sensors to changes its gait and traverse past any obstacles it might encounter. Due to time constraints the autonomous functionality was not developed I am currently in the process of creating an SPI like interface for the FPGA to complete the project.